Ստորգետնյա հանքերի անօդաչու հետքերով բեռնափոխադրման համակարգ

Համակարգի գործառույթները
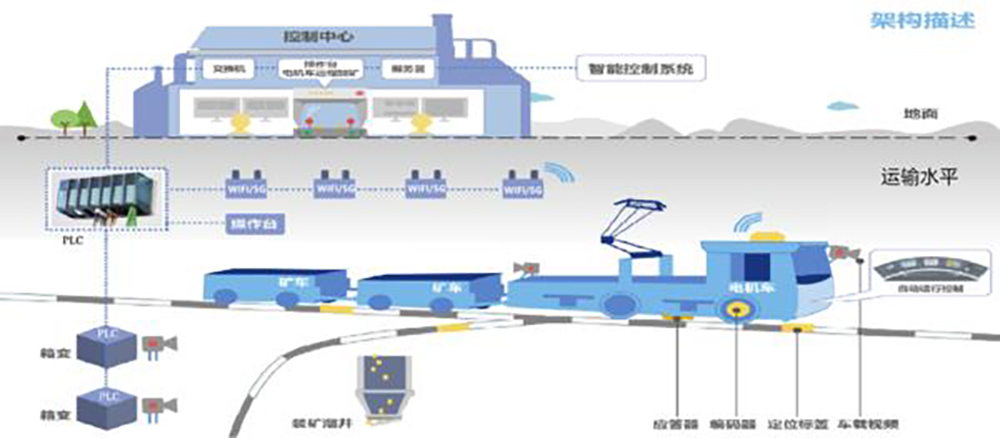
Առանց վարորդի էլեկտրական լոկոմոտիվային համակարգը բաղկացած է ավտոմատ շահագործման (ATO) կառավարման համակարգից, PLC կառավարման միավորից, ճշգրիտ դիրքորոշման միավորից, խելացի բաշխիչ միավորից, անլար կապի ցանցի միավորից, անջատիչ ազդանշանի կենտրոնացված փակման կառավարման միավորից, վիդեո մոնիտորինգի և վիդեո AI-ի: համակարգ և կառավարման կենտրոն։
Գործառույթի համառոտ նկարագրությունը
Լիովին ավտոմատ նավարկության գործողություն.ֆիքսված արագությամբ նավարկության տեսության համաձայն, ըստ տրանսպորտային մակարդակի յուրաքանչյուր կետի փաստացի իրավիճակի և պահանջների, տրանսպորտային միջոցի նավարկության մոդելը կառուցված է լոկոմոտիվի կողմից երթևեկության արագության ինքնավար ճշգրտումն իրականացնելու համար:
Ճշգրիտ դիրքավորման համակարգ.Լոկոմոտիվի ճշգրիտ դիրքավորումը ձեռք է բերվում կապի տեխնոլոգիաների և փարոսների ճանաչման տեխնոլոգիայի և այլնի միջոցով, աղեղների ավտոմատ բարձրացման և արագության ինքնավար կարգավորմամբ:
Խելացի առաքում.Տվյալների հավաքագրման միջոցով, ինչպիսիք են նյութի մակարդակը և դասակարգումը յուրաքանչյուր շոգեքարշի, այնուհետև, ըստ իրական ժամանակում յուրաքանչյուր լոկոմոտիվի դիրքի և շահագործման կարգավիճակի, լոկոմոտիվը ավտոմատ կերպով նշանակվում է աշխատանքի:
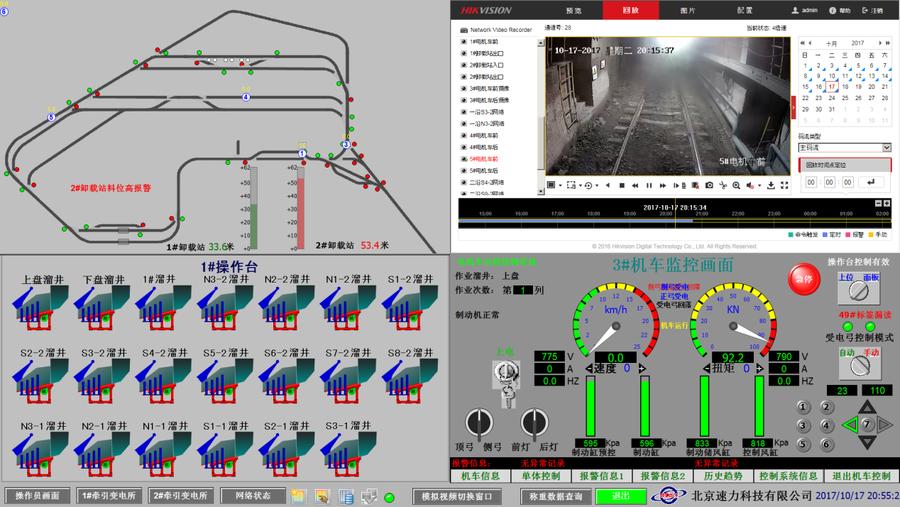
Հեռավոր ձեռքով բեռնում.Հեռավոր ձեռքով բեռնում կարելի է հասնել մակերեսի վրա՝ վերահսկելով բեռնման սարքավորումները:(Ըստ ցանկության լրիվ ավտոմատ բեռնման համակարգ)
Խոչընդոտների հայտնաբերում և անվտանգության պաշտպանություն.Մեքենայի առջև ավելացնելով բարձր ճշգրտության ռադարային սարք՝ մեքենայի առջև ընկնող մարդկանց, տրանսպորտային միջոցների և ժայռերի հայտնաբերմանը հասնելու համար, մեքենայի անվտանգ հեռավորությունն ապահովելու համար, մեքենան ինքնավար կերպով կատարում է մի շարք գործողություններ, ինչպիսիք են ձայնագրությունը: շչակը և արգելակումը:
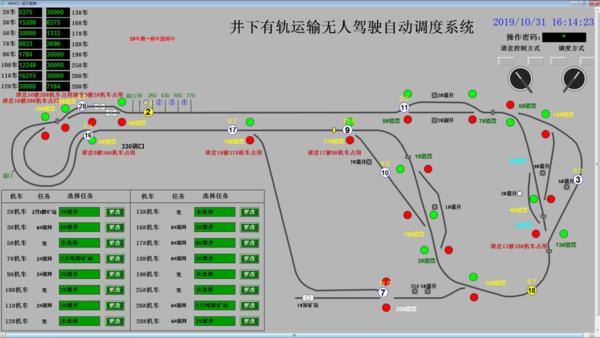
Արտադրության վիճակագրության գործառույթ.Համակարգը ավտոմատ կերպով իրականացնում է լոկոմոտիվների վազքի պարամետրերի, վազքի հետագծերի, հրամանների տեղեկամատյանների և արտադրության ավարտի վիճակագրական վերլուծություն՝ արտադրության ընթացիկ հաշվետվությունների ձևավորման համար:
Համակարգի կարևորագույն կետերը.
Ստորգետնյա երկաթուղային տրանսպորտի համակարգերի ավտոմատ շահագործում.
Առանց վարորդի ստորգետնյա ընտրովի լոկոմոտիվի շահագործման նոր ռեժիմի առաջխաղացում:
Ստորգետնյա երկաթուղային տրանսպորտի համակարգերի ցանցային, թվային և վիզուալ կառավարման իրականացում։

Համակարգի արդյունավետության օգուտների վերլուծություն
Առանց հսկողության ստորգետնյա, օպտիմալացնելով արտադրական օրինաչափությունները:
Աշխատողների թվի պարզեցում և աշխատուժի ծախսերի կրճատում:
Աշխատանքային միջավայրի բարելավում և ներքին անվտանգության բարձրացում:
Փոփոխությունները կառավարելու խելացի գործառնական մեխանիզմներ:
Տնտեսական օգուտներ.
- Արդյունավետություն:արտադրողականության բարձրացում մեկ լոկոմոտիվով:
Կայուն արտադրություն՝ հանքաքարի խելացի բաշխման միջոցով:
- Անձնակազմ:լոկոմոտիվավար և ականազերծման օպերատոր մեկում.
Մեկ աշխատողը կարող է կառավարել բազմաթիվ լոկոմոտիվներ:
Հանքի բեռնաթափման կետում դիրքերում անձնակազմի կրճատում.
- Սարքավորումներ:նվազեցնելով սարքավորումների վրա մարդու միջամտության արժեքը:
Կառավարման առավելությունները.
Սարքավորման տվյալների վերլուծություն՝ սարքավորումների նախնական սպասարկումը հնարավոր դարձնելու և սարքավորումների կառավարման ծախսերը նվազեցնելու համար:
Բարելավել արտադրության մոդելները, օպտիմալացնել անձնակազմը և նվազեցնել անձնակազմի կառավարման ծախսերը:





